Admin
مدير المنتدى


عدد المساهمات : 18864
التقييم : 35108
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Mechanical Design and Analysis of a Novel Three-Legged, Compact, Lightweight, Omnidirectional, Serial–Parallel Robot with Compliant Agile Legs الجمعة 26 أغسطس 2022, 1:26 am موضوع: بحث بعنوان Mechanical Design and Analysis of a Novel Three-Legged, Compact, Lightweight, Omnidirectional, Serial–Parallel Robot with Compliant Agile Legs الجمعة 26 أغسطس 2022, 1:26 am | |
| 
أخواني في الله
أحضرت لكم
بحث بعنوان
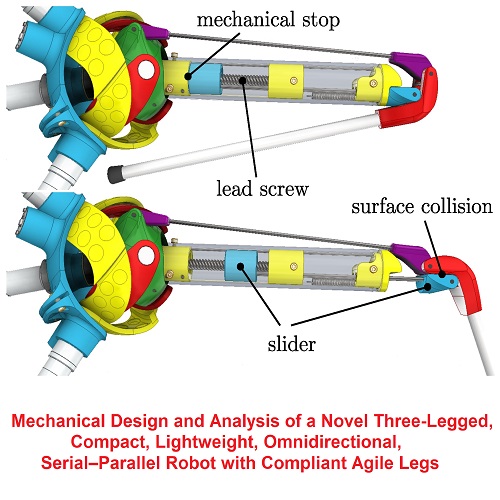
Mechanical Design and Analysis of a Novel Three-Legged, Compact, Lightweight, Omnidirectional, Serial–Parallel Robot with Compliant Agile Legs
David Feller and Christian Siemers
Institute of Electrical Information Technology, Clausthal University of Technology,
D-38678 Clausthal-Zellerfeld, Germany; christian.siemers@tu-clausthal.de
* Correspondence: david.feller@tu-clausthal.de
و المحتوى كما يلي :
Abstract: In this work, the concept and mechanical design of a novel compact, lightweight, omnidirectional three-legged robot, featuring a hybrid serial–parallel topology including leg compliance is
proposed. The proposal focusses deeply on the design aspects of the mechanical realisation of the
robot based on its 3D-CAD assembly, while also discussing the results of multi-body simulations,
exploring the characteristic properties of the mechanical system, regarding the locomotion feasibility
of the robot model. Finally, a real-world prototype depicting a single robot leg is presented, which
was built by highly leaning into a composite design, combining complex 3D-printed parts with
stiff aluminium and polycarbonate parts, allowing for a mechanically dense and slim construction.
Eventually, experiments on the prototype leg are demonstrated, showing the mechanical model
operating in the real world.
Keywords: legged robot; locomotion; spherical parallel manipulator; multi-body simulation;
3D printing; mechanical desig
Conclusion and Future Work
In this paper, a three-legged robot was presented, covering the concepts and realisations of the mechanical design, while targeting a lightweight, agile, and omnidirectional
robot that matches the well-known SLIP model. The robot design was then examined by
rigid multi-body simulations, and a real-world prototype model of one leg was shown.
The robot features a parallel joint actuation for the hip joints with the knee actuator
connected in series, yet still being located outside of the moving leg structure. Thus, this
design makes it possible to place all 12 actuators in an interlocking arrangement inside the
robot torso, concentrating the robot mass successfully in a narrow central volume, yielding
agile legs with low mass and inertias.
As a continuation of the previous work, the general robot design focussed on 3D
printing and a compound design, which allow for highly optimised shapes and a dense
geometric arrangement. With the realisation of specifically shaped parts, the mechanism
thereby implements a virtual supporting central hip joint as an extension to the typical
spherical parallel manipulator unit, absorbing high loads and relieving the outer parallel
structure from the necessity to also withstand forces that are not part of the intended degrees
of freedom of the spherical hip joint. Thus, the actuation design yields a mechanical layout
of the robot that features a non-overconstrained hybrid serial–parallel structure. Being
not overconstrained is a key element of the hip joint design as this ensures the specifically
intended and decoupled force and torque load distribution between the parts of mechanicalRobotics 2022, 11, 39 41 of 43
structure, the linkages, and the actuators. Hence, this yields compact and thin linkages
that are only required to transfer the hip joint torque components. Furthermore, with the
Cardan-type layout of the support joint, the distant actuation of the knee joint becomes
possible while also incorporating the spring degree of freedom onto a shared axis—used for
the connection of the tool-platform and the support joint—hence successfully combining
multiple aspects of the robot functionality with minimal constructive overhead.
A further design aspect that was considered important was the mechanical redundancy
of the four-DOF leg design, which was based on the spherical mechanism design of the hip
joints, and is part of future investigations, as this may be an option to optimise the joint
load distribution on the individual actuators.
The last aspect of the robot design regards the spring implementation as a central
aspect of enabling energetically efficient locomotion, while the actual mechanical realisation
was based on a four-bar closed-loop linkage that exploits the geometry of the Cardan-type
hip support joint. Specifically, the presented mechanism thereby uses one axis simultaneously for the Cardan joint and for the spring DOF and also includes one bar that changes
its length as the knee joint is actuated by the integrated slider mechanism.
As a final conclusion, the robot presented employed several closely interwoven mechanical structures as a measure to incorporate multiple target properties. Since the resulting mechanical structure is of a highly complex nature, this might also result in constraints
or drawbacks in comparison to more simple robot designs. Regarding the intricate layout
of the mechanism, future work thus will contain analyses based on the kinematical and
Jacobian description of the robot model, including the examination regarding singularities,
performance criteria, conditioning evaluation over the robot workspace, and the robot’s dynamic behaviour during motion. Therefore, the simulation model will be updated to better
approximate the real prototype, which also includes attention to several communication
and hardware components—e.g., sensors and actuators—which will additionally influence
the behaviour of the real-world model and possibly impose certain restrictions, unlike in
the simulation. In this regard, future iterations of the robot model will feature more robust
and stiff 3D-printed parts, which should further close the gap between the simulation and
real-world model as an important measure to reliably deploy control algorithms tested in
simulation on the real model. Thus, future research will further investigate the locomotion
capabilities of the robot model and consequently focus on real-world controller implementations and experiments as a measure to further explore the potential of the mechanical
design itself for the purpose of legged locomotion.
Supplementary Materials: The following Supplementary Materials are available online at https:
http://www.mdpi.com/article/10.3390/robotics11020039/s1 and also at [45]:
• Video S1: Robot Prototype by David Feller. One video including multiple sections: (1) The
filmed sequence of the actuated knee motion with additional comments. (2) The filmed closedloop leg kinematics demonstration. (3) The drop experiment simulation from Section 3.3 for
both stiff and compliant configurations. (4) A filmed non-actuated mechanical visualisation
of the real-world hip manipulator based on the general SPM build for the preliminary robot
model. Additional clips of the preliminary model being actuated based on joint space PID
control through commands via the real-time-capable hardware interface dSpace ds1104 [47];
• Data S1. Free Fall Experiment Data. Four diagrams for the drop experiment simulation, showing the complete force/torque and profile plots for Setups A and B. One table including numerical data of the impact torques and reduction ratios for the drop experiment simulation;
• Data S2. Push Down Experiment Data. Simulation measurement signals and calculated signals
of the push down experiment from Section 3.4 exported as txt files from MATLAB table data.
Author Contributions: Conceptualisation, D.F.; methodology, D.F.; software, D.F.; validation, D.F.;
formal analysis, D.F.; investigation, D.F.; resources, D.F.; data curation, D.F.; writing—original draft
preparation, D.F.; writing—review and editing, D.F.; visualisation, D.F.; supervision, D.F. and C.S.;
project administration, D.F.; funding acquisition, D.F. All authors have read and agreed to the
published version of the manuscript.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Mechanical Design and Analysis of a Novel Three-Legged, Compact, Lightweight, Omnidirectional, Serial–Parallel Robot with Compliant Agile Legs
رابط مباشر لتنزيل بحث بعنوان Mechanical Design and Analysis of a Novel Three-Legged, Compact, Lightweight, Omnidirectional, Serial–Parallel Robot with Compliant Agile Legs 
|
|











