Admin
مدير المنتدى


عدد المساهمات : 18739
التقييم : 34745
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot الأربعاء 12 أكتوبر 2022, 11:06 am موضوع: بحث بعنوان Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot الأربعاء 12 أكتوبر 2022, 11:06 am | |
| 
أخواني في الله
أحضرت لكم
بحث بعنوان
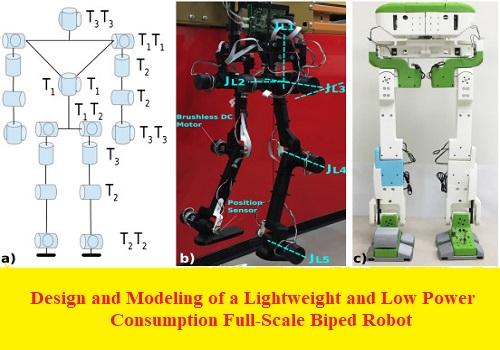
Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot
Michele Folgheraiter , and Bauyrzhan Aubakir
Robotics and Mechatronics Department,
School of Science and Technology,
Nazarbayev University,
53 Kabanbay Batyr Ave., Astana, Kazakhstan
michele.folgheraiter@nu.edu.kz
b.aubakir@nu.edu.kz
Received 6 June 2018
Revised 20 July 2018
Accepted 31 July 2018
Published 6 September 2018
و المحتوى كما يلي :
This paper introduces the design methodology, the modeling and the power consumption tests
for a newly developed biped robot equipped with 12 DOFs. The robot is 1.1 meters tall
(lower limbs) which makes it comparable in dimension with other state-of-the-art full-scale
humanoids. By using a combination of 3D printing techniques and lightweight materials, the
system weighs only 10.8 kg (without batteries) while retaining high links strength and rigidity.
Without compromising the workspace dimension, the robot presents a very low weight-toheight ratio (9.8 kg/m) that translates into a safer operation and reduced energy consumption.
To perform elementary locomotion primitives, e.g., changing the support from one foot to the
other or lifting its body, the robot prototype consumes only 65 watts. Simulation results
demonstrate the suitability of the robot's kinematics to perform walking motion and predict an
average power consumption of 200 watts. The direct kinematics of the robot is presented
together with its inverse dynamics based on a Chaotic Recurrent Neural Network (CRNN). The
adaptive model is identi¯ed using a recursive least squares algorithm that allows the CRNN to
predict the torques at di erent step lengths with a MSE of 0.0057 on normalized data. erent step lengths with a MSE of 0.0057 on normalized data.
Keywords: Humanoid robotics; biped robot; kinematic design; 3d printing; dynamic modeling;
recurrent neural networks.
1. Introduction
Humanoid robotics is a relatively new research ¯eld which aims at developing
anthropomorphic robotics systems intended to be used in public and household
‡Corresponding author.
This is an Open Access article published by World Scienti¯c Publishing Company. It is distributed under
the terms of the Creative Commons Attribution 4.0 (CC-BY) License. Further distribution of this work is
permitted, provided the original work is properly cited.
International Journal of Humanoid Robotics
Vol. 15, No. 5 (2018) 1850022 (32 pages)
°c The Author(s)
DOI: 10.1142/S0219843618500226
1850022-1
Int. J. Human. Robot. 2018.15.
Conclusion
In this paper, we introduce the design and the model of a newly developed lightweight and full-size biped robot intended for application in household and public
environments. The robot presents a total of 12 rotational joints, 6 for each leg, that
allow the system to perform static and dynamic walking. The ¯rst three joints in the
hip have axes that intersect in a common point such that the inverse kinematics
admits a closed-form solution. The pitch joint of the ankle is actuated by a servomotor located in the upper part of the lower leg through an elastic synchronous belt.
This has the eect to reduce the eective stiness of the joint and absorb impact
forces while the robot is walking. Four force sensors are integrated in each foot to
calculate the center of pressure while standing or walking. The robot is equipped with
on-board computational units that are capable to implement low-level control
strategies, and that allow to control the robot remotely by using a graphical user
interface or a console. By using a combination of 3D printing techniques and lightweight materials, we could design a robot which is only 10.8 kg and of comparable
dimensions with other state-of-the-art full size humanoid robots. By having a weightto-length ratio of only 9.8 kg/m, the system is inherently safe while interacting with
humans. Furthermore, with a low links' weight and inertia, the average power
consumption is estimated by simulation to be 200 W, while performing a static gait.
Experiments conducted on the real prototype con¯rm this ¯gure, thus the robot
absorbs 45 W to move its weight from the center to the left or right foot and 65 W to
perform a squatting motion primitive. The direct kinematics of the robot is introduced together with its inverse dynamic model based on a CRNN. By using the RLS
algorithm, joint torques can be predicted from instantaneous joint positions at different step lengths with a MSE of 0.0057.
To perform balance and gait control, there are dierent algorithms and techniques available in literature. Many of them are model-based and verify the stability of
the robot by using the concept of Zero Moment Point (ZMP).41–43 Others rely on the
estimation of the Center of Pressure (COP) by using the data from sensors installed
under the feet.44–46 In Ref. 47 a motion primitives switching methodology is introduced
that provides a more e±cient posture control to compensate for dierent disturbances
patterns. The dynamic model of the robot together with the information of the COP
Design and Modeling of Full-Scale Biped Robot
1850022-27
Int. J. Human. Robot. 2018.15. Downloaded from www.worldscientific.com
by 217.54.46.56 on 06/29/22. Re-use and distribution is strictly not permitted, except for Open Access articles.and the torques limits are used as constraints for a quadratic program algorithm in
order to ¯nd the optimal joint trajectories. In Ref. 48 a passivity-based control method
is presented, which using minimal actuation is capable to perform stable gaits for a
biped equipped with compliant ankle's joints. By reducing at the minimum, the active
control phases to compensate for the eect of gravity and by employing the intrinsic
oscillatory dynamics of the biped, it was possible to minimize the energy consumption
and to walk on arbitrary slopes.
In comparison with Ref. 47, where the motion primitives are the outcome of an
oline optimization process, our methodology to control the robot will be based on an
adaptive model that can self-adjust during the robot operation. It will be possible to
introduce an additional input to the CRNN that will consider the disturbance force
estimation in order to adapt the gait accordingly. As we had already demonstrated
the capability of a single CRNN to generate gates with dierent step lengths, it will
also be possible to adjust the gate to compensate for the dierent disturbances
present in the robot environment. If in Ref. 47, the primitives are recorded as separated models, by using a CRNN of su±cient complexity, it will be possible to
generate dierent robot behaviors by using a single neural network. Furthermore,
thanks to the generalization properties of a CRNN, switching between dierent gates
will be performed smoothly. In comparison with Ref. 48, where an underactuated
biped is considered that integrates a 3 DOFs compliant ankle, our biped is instead
fully actuated and includes only one compliant DOF in the ankle. Our solution will
therefore require more energy. However, on the other hand, it will also allow a better
controllability of the robot. This is particularly important when the robot is supposed to move in a household environment, where dierent static and dynamic
obstacles are present.
As a future work, we intend to do extensive testing of the robot prototype while
performing dierent gaits in order to measure the energy consumption. It will be
necessary to install additional sensors like IMUs and depth cameras that will allow to
implement balancing motion primitives and identify and avoid obstacles while
walking. Furthermore, we plan to use the developed adaptive inverse dynamics
to implement a model-based feedback control system able to compensate for nonlinearities and changing dynamic conditions while the robot is operating.
Acknowledgment
This work was supported by the Ministry of Education and Science of the Republic of
Kazakhstan under the grant and target funding scheme agreement #328/239-2017
and by Nazarbayev University under the Faculty Development Competitive
Research Grants Program award #090118FD5343.
M. Folgheraiter & B. Aubakir
1850022-28
Int. J. Human. Robot. 2018.15.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot
رابط مباشر لتنزيل بحث بعنوان Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot 
|
|











