Admin
مدير المنتدى


عدد المساهمات : 18727
التقييم : 34715
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Practical Velocity Tracking Control of a Parallel Robot Based on Fuzzy Adaptive Algorithm الخميس 28 يوليو 2022, 11:24 pm موضوع: بحث بعنوان Practical Velocity Tracking Control of a Parallel Robot Based on Fuzzy Adaptive Algorithm الخميس 28 يوليو 2022, 11:24 pm | |
| 
أخواني في الله
أحضرت لكم
بحث بعنوان
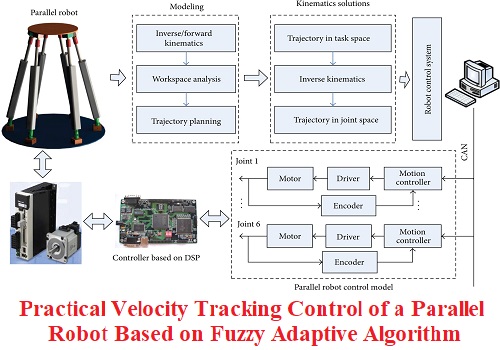
Practical Velocity Tracking Control of a Parallel Robot Based on Fuzzy Adaptive Algorithm
Research Article
Zude Zhou,1,2 Wei Meng,1,2 Qingsong Ai,1,2 Quan Liu,1,2 and Xiang Wu2
1 School of Information Engineering, Wuhan University of Technology, Wuhan, Hubei 430070, China
2 Key Laboratory of Fiber Optic Sensing Technology and Information Processing, Wuhan University of Technology,
Ministry of Education, Wuhan, Hubei 430070, China
Correspondence should be addressed to Qingsong Ai; qingsongai@whut.edu.cn
Received 14 March 2013; Revised 20 June 2013; Accepted 20 June 2013
Academic Editor: Shane Xie
و المحتوى كما يلي :
which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Due to the advantages of its compact structure and high operation accuracy, the six degrees of freedom (6-DOF) parallel platform
has been widely used as a carrier of medical rehabilitation devices. Fuzzy adaptive algorithm does not depend on the mathematical
model of controlled object, which possesses good nonlinear characteristics. Those entire features make it an effective method to
control such complex and coupling platforms. To facilitate the application of robotics in lower limb rehabilitation fields, a robotic
system in practical environment was established based on kinematics modeling of the 6-DOF Stewart-based platform. In order
to improve the velocity tracking accuracy, this paper proposed a closed-loop control strategy based on fuzzy adaptive algorithm.
The velocity feedback information was utilized to modify the PID parameters adaptively in realtime through fuzzy inference units.
Several experiments in practical environment were conducted, and the results demonstrated that the proposed algorithm could
effectively reduce the speed jitter, enhance the position and velocity tracking precision of the robot, and the reliability and robustness
of the system could also be ensured
Conclusion and Future Work
During the motion control of the rehabilitation robot, the
system may become unstable due to the uncertain variations
of the system loads and dynamic parameters, which would
lead to the secondary injury of the patients. Therefore, it is
of great significance to maintain the trajectory and velocity tracking accuracy and stability for medical purpose [18]. This
paper aims at designing an effective method to control the
Stewart robot used for lower limb rehabilitation. Based on the
study on parallel robot’s kinematic model, a prototype of 6-
DOF parallel robot control system is established, and accordingly a fuzzy PID adaptive controller is proposed for velocity
close-loop control. The experimental results performed in the
actual experiment demonstrate that applying the proposed
adaptive fuzzy control method to 6-DOF parallel robot
manipulator is reasonable and valid; the position and velocity
tracking accuracy can be greatly improved. Currently, it
seems that there are not enough realistic applications of
the parallel robot; thus it is worthwhile to propose a fuzzy
adaptive controller that can achieve a good performance in
the actual environment and put it into practice for medical
purpose.
The future works involve improving the dynamic
response of such parallel platform and obtaining a better
trajectory tracking performance by combining the fuzzy
controller with other advanced control techniques, such
as neural network and sliding mode control strategies.
Furthermore, in order to improve the rehabilitation results,
force feedback between the robot and the patient should
be taken into consideration; putting the position/force
hybrid control and impedance control into practice is also
important in this field. Finally, in order to implement the
rehabilitation control strategies in the actual environment,
more attentions should be attracted to biomedical signals
processing, human-machine interface, and the rehabilitation
assessment strategies.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Practical Velocity Tracking Control of a Parallel Robot Based on Fuzzy Adaptive Algorithm
رابط مباشر لتنزيل بحث بعنوان Practical Velocity Tracking Control of a Parallel Robot Based on Fuzzy Adaptive Algorithm 
|
|











