Admin
مدير المنتدى


عدد المساهمات : 18717
التقييم : 34685
تاريخ التسجيل : 01/07/2009
الدولة : مصر
العمل : مدير منتدى هندسة الإنتاج والتصميم الميكانيكى
 |  موضوع: بحث بعنوان Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots الجمعة 25 أكتوبر 2019, 11:22 pm موضوع: بحث بعنوان Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots الجمعة 25 أكتوبر 2019, 11:22 pm | |
| 
أخوانى فى الله
أحضرت لكم
بحث بعنوان
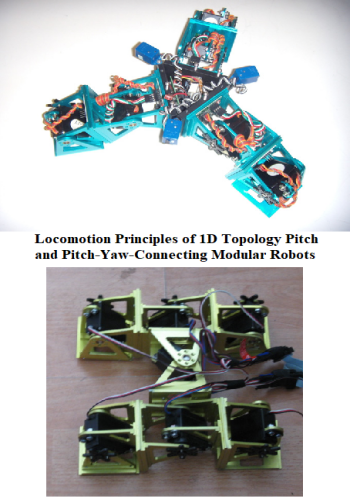
Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots
Juan Gonzalez-Gomez , Houxiang Zhang and Eduardo Boemo
و المحتوى كما يلي :
1. Introduction
2. Classification of Modular Robots
3. Control approach
4. Locomotion in 1D
5. Locomotion in 2D
6. Experiments
7. Conclusions
8. Future works
9. References
1. Introduction
The last few years have witnessed an increasing interest in modular reconfigurable robotics. The applications include industrial inspection (Granosik, 2005), urban search and rescue (Zhang, 2006a), space applications (Yim, 2003) and military reconnaissance (Zong, 2006).
They are also very interesting for research purposes. Modular robots are composed of some identical or similar units which can attach to and detach from each other and are capable of changing the configurations.
Some modular prototypes are quite famous, such as Polybot from Mark Yim (Yim, 2000), CONRO (Castano, 2000), SuperBot (Chen, 2006) from the Information Sciences Institute and Computer Science and M-TRAN robot from Japan (Kurokawa, 2003). These prototypes have two things in common. Normally this kind of robots consists of many modules which are able to change the way they are connected. In addition the modular approach enables robots the reconfiguration capability which is very essential in such tasks which are difficult for a fixed-shape robot. It also endows the mobile robotic system the characteristics of versatility, robustness, low-cost and fast-prototyping so that new configurations of different robots can be built fast and easily, for the exploration, testing and analysis of new ideas. The more exciting advantage is that the robots have the capability of adopting different kinds of locomotion to match various tasks and suit complex environments.
Modular robots can be classified according to both the connection between the modules and the topology of their structure. One important group are the Snake robots, whose configurations consist of one chain of modules (1D Topology). Locomotion is performed by means of body motions. Depending on the type of connection between the modules, there are pitch, yaw and pitch-yaw connecting snake robots. The locomotion capabilities of the yaw family have been thoroughly studied (Hirose, 1993). There is also research work on the locomotion capabilities of some specific pitch-yaw modular robots. In (Chen, 2004) the rolling gaits are comprehensively studied and (Mori, 2002) implemented different gaits in the ACM robot. However, the locomotion principles for the whole pitch-yaw family have not been fully studied.
In this chapter we propose a model for the locomotion of pitch-yaw snake robots that allows them to perform five different gaits: forward and backward, side-winding, rotating, rolling and turning. The rotating gait is a new one that, to the best of our knowledge has not been O previously achieved by other researchers. Each joint is controlled by means of a sinusoidal oscillator with four parameters: amplitude, frequency, phase and offset. The values of these parameters and the relations between them determine the type of gait performed and its trajectory and velocity. The locomotion in 1D and 2D for both, the pitch and pitch-yaw connecting modular robots is studied. The relationships between the oscillator parameters to achieve the different gaits are summarized in twelve locomotion principles.
Another issue are the minimal configurations (Gonzalez-Gomez, 2005) that can move both in 1D and 2D. They are novel configurations that minimize the number of modules need to perform the locomotion. This idea is important for maximizing the number of sub-robots in which a self-reconfigurable robot can be split. Experiments show that configurations consisting of two and three modules can move in 1D and 2D respectively. Their locomotion principles are also presented.
Four prototypes have been built: two minimal configurations and two eight-modules snakes, with both pitch and pitch-yaw connections. A series of successful tests are given to confirm the principles described above and the robot’s functional capability. In the end of the chapter, our future work and some conclusions are given.
7. Conclusions
The Locomotion principles for the groups of pitch-pitch connection and pitch-yawconnecting modular robots have been studied, simulated and finally tested on real robots. Five different gaits have been achieved: 1D sinusoidal, rolling, rotating, turning and side winding. The rotating gait is a new one not previously mentioned by other researchers to the best of our knowledge. All the gaits have been implemented using a biologically inspired model based on sinusoidal generators that can be implemented efficiently on low cost microcontrollers.
The minimal configurations for both locomotion in 1D and 2D have been found. They are novel configurations that minimize the number of modules and therefore maximize the number of robots in which a self-reconfigurable robot can split into.
Finally a complete new simulation environment for 1D topologies robots has been developed and used to collect all the data needed for the study of the locomotion principles.
8. Future works
In future work the relationships between the sinusoidal generator parameters and the kinematics will be studied in further. Also, the kinematics of the 2D gaits will be developed based on the shape of the 3D waves. The climbing properties of the pitch-yaw-connect.
كلمة سر فك الضغط : books-world.net
The Unzip Password : books-world.net
أتمنى أن تستفيدوا من محتوى الموضوع وأن ينال إعجابكم
رابط من موقع عالم الكتب لتنزيل بحث بعنوان Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots
رابط مباشر لتنزيل بحث بعنوان Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots 
|
|











